

 Italian
Italian German
German Russian
Russian Turkish
Turkish Portuguese
Portuguese Spanish
Spanish English
English
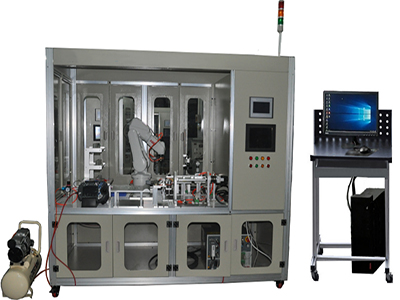

La plate-forme de formation de robot industriel GLIR-2 se compose d'un robot industriel, d'une plate-forme de formation opérationnelle, d'un module d'application, d'un rack de placement de module, d'un hôte de programmation, etc. Elle peut être utilisée pour évaluer l'étalonnage des coordonnées des outils de robot industriel, la programmation et le fonctionnement des trajectoires planes et courbes, l'assemblage, la manutention, la palettisation, le soudage simulé, le meulage et le polissage, l'inspection visuelle industrielle et d'autres compétences d'application dans le domaine industriel, ainsi que les compétences de programmation et de simulation hors ligne des robots.
GLIR-2 Plateforme de formation aux robots industriels
Ⅰ、Présentation
La Plateforme de formation aux robots industriels GLIR-2 comprend un robot industriel, une plateforme de formation opérationnelle, un module d'application, un support de placement de modules, un hôte de programmation, etc. Elle permet d'évaluer l'étalonnage des coordonnées d'outils de robots industriels, la programmation et l'exploitation de trajectoires de surfaces planes et courbes, l'assemblage, la manutention, l'empilage, la simulation de soudage, le meulage et le polissage, l'inspection visuelle industrielle et d'autres compétences d'application industrielle, ainsi que la programmation et la simulation de robots hors ligne.
La plateforme de formation intègre des technologies de fabrication avancées telles que la robotique industrielle, la transmission mécanique, l'électronique et l'électricité, la détection intelligente, la commande programmable, la vision industrielle, l'informatique et les technologies de communication de l'Internet des objets (IoT), couvrant ainsi des connaissances professionnelles dans de multiples disciplines telles que la robotique industrielle, la conception mécanique, l'automatisation électrique, la détection intelligente et la fabrication intelligente.
Ⅱ、Présentation de la configuration du produit
1. Robot industriel
(1) Corps du robot
Robot industriel configuré de classe 3 kg : type IRB120 3/0,6.
Les paramètres techniques du robot sont les suivants :
1) Rayon de travail du manipulateur industriel : ≥ 580 mm ;
2) Charge utile : ≥ 3 kg ;
3) Nombre d’axes : 6 axes ;
4) Plage de rotation et vitesse maximale de chaque articulation du robot : Axe 1 : -165°~+165°, 250°/s ; Axe 2 : +110°~-110°, 250°/s ; Axe 3 : +70°~-90°, 250°/s ; Axe 4 : +160°~-160°, 320°/s ; Axe 5 : +120°~-120°, 320°/s ; Axe 6 : +400°~-400°, 420°/s ;
5) Indice de protection : IP54 ou supérieur ;
6) Nombre de degrés de liberté : 6 ;
7) Temps d’accélération : 0,07 s ;
8) Performances : Cycle de prélèvement de 1 kg, 25 × 300 × 25 mm : 0,58 s, vitesse maximale TCP : 6,2 m/s, accélération maximale TCP : 28 m/s, temps d’accélération 0-1 m/s : 0,07 s.
9) Poids du manipulateur : ≤ 25 kg ;
10) Répétabilité de position : ≤ 0,01 mm ;
11) Sécurité : arrêt de sécurité, arrêt d’urgence ; surveillance du circuit de sécurité à 2 canaux ; dispositif de démarrage à 3 positions ;
12) Utilisation d’un logiciel hors ligne pour la programmation en temps réel, le signal d’E/S et la surveillance dynamique des mouvements 3D du robot pendant sa durée de vie. 13) Fonction de sauvegarde et de récupération à distance du système robotique ;
14) Compatible avec l'interface du système de vision industrielle et protocole de communication du module ve.mod à adaptation rapide.
15) Interface PC en option ;
16) Système de reconnaissance d'état d'orientation en temps réel et de correction de la validité à démarrage automatique ;
17) Fonction de réglage automatique de la détection du poids et de la charge de l'outil
18) Fonction de réglage fin en temps réel de la trajectoire du robot. Bouton d'E/S programmable personnalisé intégré
19) Système d'exploitation manuel 3D confortable et en temps réel par joystick, fonction d'économie d'énergie, mise à niveau permanente des fonctions du système robotique
20) Prise en charge du langage de programmation RAPID et interprétation et exécution directes.
(2) Contrôleur de robot : Contrôleur compact IRC5. Paramètres principaux :
1) Dimensions : hauteur × largeur × profondeur : 310 mm × 449 mm × 442 mm (± 5 mm) ;
2) Raccordement électrique : Tension d’alimentation : monophasé 220/230 V, 50-60 Hz ;
3) Indice de protection : IP20 ;
4) Paramètres environnementaux : température ambiante de 0 à 45 °C, humidité relative jusqu’à 95 % (sans condensation) ;
5) Les fonctions les plus puissantes du contrôleur sont concentrées dans un boîtier compact, permettant un gain de place. L’alimentation monophasée est facile à déboguer, les interfaces externes sont préréglées pour tous les signaux, et le système d’E/S extensible intégré comprend au moins 16 entrées/16 sorties, permettant l’extension de divers périphériques, tels que la vision industrielle.
6) Le logiciel du système de contrôle du robot doit être basé sur la plateforme WINCE afin de faciliter le développement secondaire basé sur le robot. La capacité de mémoire SSD d’origine du système de contrôle du robot est de 1 Go et une extension USB est possible.
(3) Boîtier d’apprentissage pour robot industriel :
1) Prise en charge du fonctionnement manuel, de l’écriture de programmes, de la configuration des paramètres et de la surveillance ;
2) Écran LCD de plus de 6,5 pouces ;
3) Résolution d'affichage supérieure à 800 × 640 ;
4) Fonction d'arrêt d'urgence ;
5) Interrupteur de démarrage à 3 positions (double circuit) ;
6) Levier de commande manuel et positionnement rapide ;
7) Indice de protection : IP54
8) Clavier à membrane 12 touches ;
9) Connexion à chaud possible ;
10) Interface USB pour la sauvegarde et la récupération des données ;
2. Plateforme de formation à l'utilisation
La plateforme de formation est une structure en profilé d'aluminium industriel d'une taille totale d'environ 2 200 x 1 040 x 1 900 mm.
3. Système de gestion des équipements de formation :
Il est contrôlé à distance sans fil par un terminal portable et dispose d'une protection contre les erreurs de phase, les surintensités à durée limitée, les ruptures rapides, les pertes de tension, la fermeture automatique, les surintensités, les surcharges et les fuites. Il dispose également d'une fonction de surveillance en temps réel de la tension, du courant, de la puissance et du facteur de puissance. La valeur de consigne est réglable manuellement. Il est équipé d'un écran LCD de 7 pouces extensible pour permettre le contrôle sans fil LORA des équipements expérimentaux (jusqu'à 32 unités), des commutateurs de contrôle d'accès, etc. Il dispose également d'une communication 485, Ethernet, Wi-Fi et d'un contrôle par signal 4G. Les données de l'instrument intelligent sont stockées sur la plateforme Alibaba Cloud.
4. Module de meulage
Il est équipé d'un ensemble de dispositifs de meulage et de plusieurs têtes de meulage de différents modèles et tailles.
5. Module de trajectoire
1) Graphiques : ligne droite, courbe plane, courbe spatiale, rayon de transition de mouvement et autres opérations
6. Module de dessin
1) Dimensions : 350 × 320 × 110 mm ;
7. Module de manutention
Le module de manutention est principalement composé d'une plaque de base fixe, d'un bloc de manutention, etc. Le bloc de manutention est divisé en trois formes, chacune de trois couleurs différentes.
Principaux paramètres techniques :
1) Matériau : triangle, cercle, carré
2) Couleur : rouge, vert, bleu
3) Nombre de pièces pouvant être logées : 18
8. Module de palettisation
Le module de palettisation est principalement composé d'une plaque de base fixe, d'un panneau de palettisation et de pièces. Il existe deux tailles de pièces différentes. Le robot industriel utilise une ventouse pour saisir les pièces de palettisation nécessaires à la réalisation de la tâche, ce qui permet de mettre en pratique la palettisation robotisée industrielle et de renforcer la formation à la programmation et à l'apprentissage rapides.
1) Position d'empilage : 2
2) Capacité : 10 pièces rectangulaires et 10 pièces carrées
9. Module d'assemblage
Il comprend une plaque de base fixe, un bloc de positionnement, un vérin de serrage, etc., pour l'apprentissage du positionnement précis des robots industriels.
1) Course du vérin biaxe : 100 mm ;
2) Plage de serrage fixe du bloc en V : φ75 mm ~ φ95 mm
10. Module de stockage
Il comprend une plaque de base fixe, un magasin stéréoscopique, des capteurs de détection, etc. Chaque emplacement de stockage est équipé d'un capteur de détection qui transmet les données au contrôleur PLC par détection de signal, et le PLC communique avec le robot via le bus.
1) Adapté à l'installation standard de positionnement de la table d'apprentissage
2) Capacité de stockage : ≥ 9 ; 3 lignes et 3 colonnes
3) Types de pièces compatibles : ≥ 2 types
11. Module positionneur
Il comprend un positionneur, une plaque de base fixe, etc. Le module s'adapte au kit de contrôleur périphérique et au kit d'interface électrique standard, et étend le positionneur au 7e axe du robot. Ce module peut être utilisé en combinaison avec d'autres modules fonctionnels, comme l'installation d'un module de rectification. Maîtrisez l'application et les méthodes de contrôle des systèmes asservis dans les robots industriels.
1) Dimensions : 451 × 260 × 253 mm
2) Dimensions de retournement : 255 × 200 × 12 mm
3) Course : ± 45° ;
4) Vitesse maximale : 10°- 30°/s ;
5) Mode d'entraînement : Servomoteur CA
6) Servomoteur : MR-JE-20A
7) Servomoteur : HG-KN23J-S100, puissance 200 W, avec codeur absolu 23 bits
12. Module d'inspection visuelle
Le système visuel se compose d'un module caméra et d'un hôte visuel. Ce dernier est chargé d'identifier et de positionner la pièce, et de communiquer avec le robot pour assurer son guidage visuel. Le module caméra se compose d'une caméra industrielle, d'un objectif, d'une source lumineuse et d'un support. La position d'installation du module caméra est réglable et fixée sur la table à l'aide de vis. La hauteur de la caméra et la luminosité de la source lumineuse sont réglables manuellement. L'hôte visuel se compose d'un contrôleur visuel, d'un écran, d'un logiciel visuel, d'un clavier, d'une souris et d'un support de montage.
1) Contrôleur de vision multifonction :
(1) Processeur Intel E3845 intégré, 1,91 GHz ;
(2) Mémoire DDR3L de 4 Go, équipée d'un stockage SSD haute fiabilité ;
(3) 3 ports réseau Gigabit Intel, protection renforcée contre les surtensions pour un fonctionnement stable des caméras de vision industrielle ;
(4) Prise en charge des fonctions d'entrée et de sortie d'isolation optocoupleur multicanal ;
(5) Le commutateur et la luminosité de la source lumineuse sont contrôlables via l'interface de la source lumineuse ;
(6) 2 interfaces HDMI, prenant en charge un affichage indépendant.
2) Source lumineuse : 24 V, source lumineuse circulaire sans ombre à 45 degrés : diamètre de la surface lumineuse : 70 mm ; Couleur : blanc ; Caractéristiques : a. Sans scintillement, la LED est alimentée en courant continu pur, sans scintillement et ne provoque pas d'interférences harmoniques avec les équipements (tels que les oscilloscopes). b. Éclairage uniforme : la lampe LED sans ombre éclaire uniformément l'objet observé à 360 °, sans ombre virtuelle et offre une excellente clarté.
3) Logiciel visuel
3.1 Logiciel de visualisation authentique (y compris la couche inférieure) : les utilisateurs n'ont pas besoin d'écrire de code. Les résultats de l'algorithme s'affichent automatiquement lorsque les paramètres sont modifiés, ce qui est simple et pratique.
3.2. Prise en charge de l'accès aux caméras de fabricants nationaux et étrangers tels que Hikvision, Dahua, Basler, etc., jusqu'à 12 caméras sont prises en charge.
3.3. Prise en charge des ports TCP/Modbus/série et autres modes de communication, et prise en charge de la carte Advantech PCI1730.
3.4. Prise en charge de l'étalonnage rapide, de l'étalonnage des articulations et de la fonction de coupure rapide par simple pression d'une touche.
3.5. Prise en charge du positionnement, de la mesure, de la lecture de codes et de la détermination de la qualité des codes-barres (normes ISO/IEC 15415 et ISO/IEC 15416).
3.6. Prise en charge de plusieurs tâches de détection simultanément.
3.7. Prise en charge de la classification des couleurs.
3.8. Prise en charge des codes unidimensionnels et de plusieurs codes unidimensionnels. Code bidimensionnel, détection de codes bidimensionnels multiples ;
3.9. Prise en charge de la correction du champ lumineux ;
3.10. Prise en charge du positionnement des contours et de la détection des points d'angle ;
3.11. Prise en charge de l'appel de fonctions d'interface API ;
3.12. Prise en charge de la modification directe des paramètres de la caméra ;
3.13. Prise en charge de l'enregistrement et de l'appel en temps réel des tâches en cours, et prise en charge du fonctionnement hors ligne des algorithmes ;
3.14. Prise en charge de l'enregistrement d'images en temps réel et de l'exportation de tables de données ;
3.15. Plus de 45 cas d'application réels ;
13. Module de contrôle électrique
Comprend un contrôleur et une interface homme-machine. Le contrôleur adopte une conception modulaire et compacte, est évolutif et dispose d'une interface de communication industrielle standard. Il est adapté à la réalisation d'applications de contrôle logique simple et avancé, de communication réseau et de contrôle, et communique avec les robots via des réseaux de communication industriels. L'interface homme-machine est confortable, multifonctionnelle et multi-intégrée.
14. Programmateur
Processeur : Intel i5-10500
Capacité de mémoire : 32 Go DDR4
Capacité du disque dur : SSD 128 Go + disque dur mécanique 1 To ;
Système d’exploitation : Windows 10 ou supérieur
Écran : 21,5 pouces
15. Système d’alimentation en air
Utilisé pour l’alimentation en air du système d’exécution pneumatique du poste de travail.
a) Pression nominale : 0,7 Mpa ;
b) Capacité du réservoir d’air : 30 L ;
c) Compresseur : 220 V/50 Hz, 0,55 Kw.
16. Protection de sécurité
La protection de sécurité comprend principalement un capot de protection, une grille de sécurité et un voyant d’alarme tricolore.
III、Projets de formation de la Plateforme de formation aux robots industriels GLIR-2
1. Reconnaissance du robot
2. Installation du robot
3. Fonctionnement manuel du robot
4. Système de coordonnées et étalonnage de l'outil
5. Gestion du programme et étalonnage de l'origine
6. Programmation des instructions de mouvement
7. Apprentissage de points et programmation du mouvement
8. Système de coordonnées de la pièce et programmation du mouvement
9. Programmation avancée des instructions
10. Fonctionnement du module d'inspection visuelle
11. Application et mise au point de divers capteurs
12. Application et mise au point de composants pneumatiques
13. Programmation des E/S
14. Programmation des conditions et des cycles
15. Manutention
16. Assemblage
17. Palettisation
18. Stockage
19. Rectification
20. Dessin
21. Écriture
22. Visualisation
23. Détection des défauts du produit Fonctionnement
24. Fonctionnement par écran tactile

Version PC synchrone :
GLIR-2 Plateforme de formation aux robots industriels http://french.biisun.com/home/category/detail/id/137.html

