Italian
Italian German
German Russian
Russian Turkish
Turkish Portuguese
Portuguese Spanish
Spanish English
English


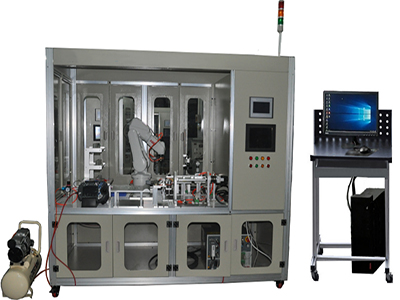
Cette plateforme est conforme aux normes de compétences professionnelles 1+X pour la programmation d'applications de robots industriels et répond aux spécifications techniques du concours d'installation et de programmation de robots industriels. Cette plateforme d'enseignement multifonctionnelle en robotique industrielle est principalement composée d'un robot industriel, d'une plateforme de base, d'un système pneumatique, d'un système de contrôle et de communication électronique, et d'une protection de sécurité.
GLIR-200 Plateforme d'enseignement multifonctionnelle pour robot industriel
Cette plateforme est conforme à la norme nationale de compétences professionnelles 1+X pour la programmation d'applications de robots industriels et répond aux spécifications techniques du concours d'installation et de programmation de robots industriels. Cette plateforme d'enseignement multifonctionnelle pour robots industriels est principalement composée de robots industriels, de plateformes de base, de systèmes pneumatiques, de systèmes de contrôle et de communication électroniques, de systèmes de protection de sécurité, etc. Elle permet de former et d'évaluer des robots industriels sur l'étalonnage des coordonnées d'outils, la programmation et l'exploitation de trajectoires planes et courbes, l'assemblage, la manutention, l'empilage, le collage, la simulation d'assemblage de tiges, le stockage tridimensionnel et le tri visuel. Elle permet également de former les étudiants à la maîtrise du fonctionnement, de la programmation, du débogage, de l'application visuelle, de la technologie des jumeaux numériques, de la programmation et de l'application d'API, de la configuration d'écrans tactiles, de la technologie des capteurs, de la technologie pneumatique, de la technologie d'entraînement de moteurs, de la technologie de communication Ethernet industrielle, etc. des robots industriels.
Ⅰ、Corps du robot industriel
1. Paramètres techniques des robots industriels : robot industriel série à six axes avec six degrés de liberté, rayon de travail maximal : ≥ 700 mm, précision de positionnement répétitif : ≤ ± 0,03 mm, charge nominale : ≥ 6 kg, méthode de communication : MODBUSCP/Ethernet.
Axe 1 Plage de mouvement Rotation +170°~-170° Vitesse maximale 370°/s
Axe 2 Plage de mouvement Bras vertical +70°~-110° Vitesse maximale 370°/s
Axe 3 Plage de mouvement Bras transversal +120°~-70° Vitesse maximale 430°/s
Axe 4 Plage de mouvement Poignet +185°~-185° Vitesse maximale 300°/s
Axe 5 Plage de mouvement Poignet pivotant +30°~-200° Vitesse maximale 460°/s
Axe 6 Plage de mouvement Basculement +355°~-355° Vitesse maximale 600°/s
2. Armoire de commande du robot industriel :
1) Circuit de sécurité intégré (arrêt d'urgence).
2) Entrée/sortie numérique 16 voies intégrées.
3) Interface entièrement en chinois, possibilité de basculer vers l'anglais.
4) Interface de communication : RS485*1, RS232*1, LAN*1, PWM*1, HDSI*1
5) Process système : incluant les procédés de soudage, de palettisation, de meulage, de pulvérisation, de visualisation, etc.
3. Programmateur d'apprentissage pour robots industriels :
1) Kit de développement secondaire et démonstration fournis avec le boîtier d'apprentissage.
2) Taille de l'écran : ≥ 8 pouces.
Ⅱ、Applications compatibles avec les robots industriels :
Ce poste de formation multifonction est équipé d'un module d'établi standard, d'un module TCP, d'un module de trajectoire, d'un module d'exécution, d'un module de tableau d'écriture, d'un module de palettisation, etc., pour répondre à diverses applications robotiques.
1. Module d'établi standard
1) Dimensions : ≥ 1800 mm x 1440 mm x 2000 mm
2. Module TCP
1) Matériau : acier à haute teneur en carbone, surface chromée.
3. Module de formation à la trajectoire
1) La trajectoire comprend des cercles, des triangles, des contours complexes et des courbes splines.
4. Module d'écriture :
1) Nombre de dessins : 8 ;
5. Module d'outils à changement rapide : composé d'un support et d'une plaque à changement rapide, etc. Différents outils à changement rapide sont fournis en fonction des objectifs de formation et des objets opérationnels.
6. Module de palettisation, bloc de matériau simulé, matériau PVC, dimensions ≥ 50 mm × 20 mm × 15 mm, quantité de 6, permettant de former au transport et à la palettisation entre deux tables de palettisation.
7. Module de transport à bande : composé d'un convoyeur à bande, d'un capteur, etc. Le moteur de régulation de vitesse entraîne le convoyeur à bande pour transporter diverses pièces.
8. Module d'alimentation de puits : composé d'un capteur d'alimentation de puits. Il permet de stocker diverses pièces et de contrôler le temps d'alimentation en fonction des besoins de formation.
9. Module d'alimentation rotatif
1) Conception intégrée d'un moteur pas à pas et d'un réducteur ;
2) Vitesse : ≥ 20 º/s ;
10. Module de matériau : composé d'un plateau de placement et d'un bloc de matériau
11. Module de commande électrique
1) API : Le système de contrôle doit utiliser un processeur hautes performances à sécurité intégrée comme cœur de commande pour répondre aux normes de sécurité industrielle. Il doit fournir une interface de communication PROFINET, une mémoire de travail de 125 Ko, une mémoire de chargement de 4 Mo, une interface CPU intégrée avec 14 entrées numériques, 10 sorties numériques et 2 entrées analogiques. La vitesse d'exécution des opérations booléennes est de 0,08 μs/instruction, la vitesse d'exécution des mots de déplacement est de 1,7 μs/instruction et la vitesse d'exécution des opérations mathématiques en nombres réels est de 2,3 μs/instruction.
2) Interface homme-machine : API compatible avec les marques ≥ 9 pouces, le programme est téléchargeable depuis le réseau.
3) Comprend un voyant lumineux tricolore et un signal sonore.
12. Module d'assemblage : composé d'un mécanisme de serrage pneumatique, etc.
13. Module de stockage
1) Double couche à 4 positions, utilisant des profilés en aluminium comme support structurel ;
III、Supports :
1. Guide de formation sur les robots industriels.
2. Instructions d’utilisation des robots industriels.
IV、Module de fonctions de base :
1. Fonction de capture de caractéristiques permettant de capturer rapidement des points, des lignes, des surfaces, le centre du cercle, le système de coordonnées et d’autres caractéristiques, ainsi que de mesurer des angles et des distances, et de mesurer la distance entre les points du robot.
3. Création et enregistrement de composants pour constituer des bibliothèques de composants. Importation de fichiers : stp, step, igs, stl, dxf et autres formats de fichiers CAO standard. Création de bibliothèques de modèles uniques.
4. Les modèles importés peuvent être divisés, fusionnés et alignés. Définition d’axes d’articulation, création de systèmes de coordonnées auxiliaires, et personnalisation de modèles de robots à structure sérielle, parallèle et mixte selon les plans du robot et les paramètres DH.
5. Prise en charge de la simulation de systèmes de coordonnées série, parallèle Delta et rectangulaires SCARA, de robots collaboratifs, de robots de pulvérisation et autres robots spéciaux, de machines-outils 5-6 axes et d'autres robots de différents types de structures et de divers mécanismes de mouvement.
6. Prise en charge de la plupart des robots du marché (marques étrangères : ABB, KUKA, Fanuc, Motoman, YASKAWA, Staubli, Nachi, OTC, Panasonic, etc., marques nationales : Efort, Estun, Siasun, Xinshida, Aobo, Liqun, Guangshu, Canopus, Luoshi et bien d'autres), machines-outils, bandes transporteuses, rails de guidage et autres composants de modèles d'équipements périphériques, prenant en charge des applications de développement personnalisées pour toutes les marques de robots.
7. Développement secondaire : Fournit un kit de développement SDK, utilisable pour le développement secondaire via des langages tels que C# et Python.
V、Module de programmation hors ligne :
1. Prise en charge des applications de traitement de divers modèles 3D complexes (courbes 3D, surfaces, etc.), importables aux formats CAO 3D standard tels que STEP, STL, IGES, DXF, etc.
2. Importation directe de données de nuages de points 3D pour générer différents chemins de traitement.
3. Calibration de la pièce par positionnement monopoint et tripoint, afin que la position de la pièce dans le logiciel soit cohérente avec sa position réelle.
4. Extraction des caractéristiques des bords du modèle 3D pour générer directement la trajectoire de traitement du robot pour des processus tels que la découpe et le soudage.
5. Prise en charge des robots courants et des post-sorties en code G, tels que KUKA/ABB/STAUBLI/FANUC/KAWASAKI et autres robots courants, ainsi que des automates Nabot, Baoyuan, Lianda, KEBA, B&R et autres, et des systèmes CNC 5 axes SIEMENS/Fanuc/SYNTEC/Lynuc/ACS. Possibilité de développer différentes post-sorties selon les besoins du client.
Ⅵ、Module de planification de ligne de production :
1. Fournit une fonction de simplification de la grille du modèle 3D et observe le nombre de grilles du modèle actuel.
2. Fournit une fonction de modification des couleurs des matériaux du modèle et une riche bibliothèque de couleurs de modèle proche de la réalité.
3. La programmation par apprentissage de points permet de générer des points PTP et des points de ligne, convertibles entre eux. L'extrémité du robot peut être déplacée pour modifier les points existants.
4. Lors de la planification de la ligne de production, le chemin de traitement généré par la programmation hors ligne peut être appelé pour la simulation.
5. Génération de matériaux personnalisée, contrôle paramétré du nombre de matériaux générés, de l'intervalle de temps, de la vitesse d'alimentation, etc., permettant de modifier la position de génération.
6. Grâce au moteur de rendu en temps réel et à la technologie visuelle VR3D, les utilisateurs peuvent basculer facilement de la scène actuelle au mode illusion tridimensionnelle en un seul clic ; dans ce mode, les utilisateurs peuvent explorer la scène, la simulation dynamique et les opérations de conception interactives.
Ⅶ、Projets de formation sur la plateforme d'enseignement multifonctionnelle pour robots industriels
(I) Installation et mise en service mécaniques et électriques
(1) Installation et mise en service du système de changement rapide d'outils pour robots industriels
(2) Assemblage mécanique de l'unité de détection, câblage des capteurs et raccordement des conduites de gaz
(3) Câblage des entrées/sorties du système de contrôle PLC
(4) Position initiale de travail du robot industriel
(II) Maintenance et exploitation du robot industriel
(1) Calibrage précis du robot industriel
(2) Mise à jour du compte-tours
(3) Calibrage TCP de l'outil
(III) Palettisation des produits
(IV) Stockage des produits
(V) Application du système de vision
(1) Composition et connexion du système de vision industriel
(2) Expérience du processus de détection du système de vision industriel
(3) Application complète du système de vision et du robot industriel
(VI) Débogage des capteurs
(1) Expérience de préhension du robot
(2) Expérience de déplacement du robot
(3) Expérience d'accélération du bras du robot
(4) Expérience de déplacement Détection
(5) Principes et applications de divers moteurs
(6) Principes et options des capteurs
(7) Installation et application de divers capteurs dans le système

Version PC synchrone :
GLIR-200 Plateforme d'enseignement multifonctionnelle pour robot industriel http://french.biisun.com/home/category/detail/id/138.html